Zeel Bhatt

Robotics, ML, Perception
I am an MS Robotics from Arizona state university. I do research in machine learning with focus on 3D vision and robotics. My research is driven by a more abstract interest in shape understanding at both the structural and semantic levels. I practice a lots of Chess and a musical instrument. I beleive humans should be immortal.
Technical Skills: C++, CUDA, GTSAM, PyTorch, OpenCV, ROS/ROS2
Education
-
M.S., Robotics Arizona State University -
B.Tech., Electronics and communication SRM University
Posts!
- My MS thesis topic(Visual Odometry via Contrastive Learning) is now on arxiv
Work Experience
Opal AI | Machine Learning Engineer
Scan2BIM. Geomteric Computer Vision. VLM
Openspace AI | Computer Vision Engineer
Advancing Spatial AI | Building robust SLAM & 3D reconstruction systems | Training 3D foundation models to redefine Spatial intelligence.
Active Perception Group | Research Assistant
MS Thesis: Visual odometry using supervised contrastive regression loss for pose estimation (Advisor: Dr. Yezhou Yang) Achieved 0.76 cm translational and 1e-6 rad rotational accuracy on the KITTI dataset
Packizon | Computer Vision Intern
Developed an RGBD camera-based, highly accurate box-dimensioning system
RRC | Robotics Research Engineer
Autonomous Vehicle: Experiments with COntrol System
Flytbase | Robotics Engineer
Robotics Software Development for Drones in ROS | Lots of Computer Vision
Intersting Projects:
SLAM mission and autonomous landing
Crreating a 3D pointmap of a rocky mountain using ORB-SLAM. while autonomously navigating and landing on the mocing rover using optical flow (Concepts: ORB-SLAM, ROS, Gazebo Simulation, Optical flow) View Code
Learning to Localize : Contrastive approach for visual localization
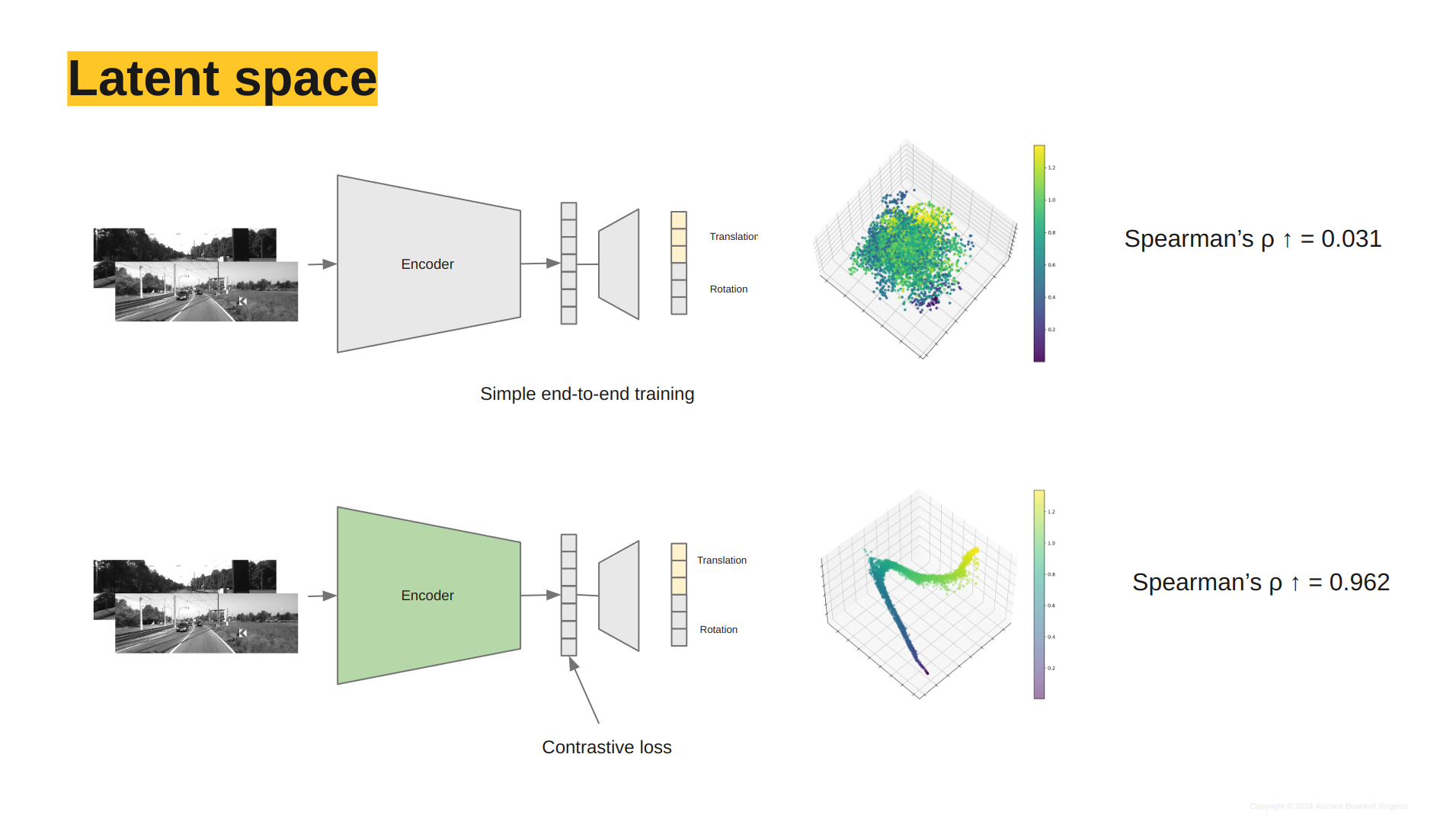
A Self-Supervised approach for Learning based Visual Localization. It is a novel use of contrastive loss funtion for finding SE(3) pose of object View Code
Bundle Adjustment using C++ Ceres Library
 See blog-post
I have written a detail article about Camera calinration and bundle Adjustment View Code
See blog-post
I have written a detail article about Camera calinration and bundle Adjustment View Code
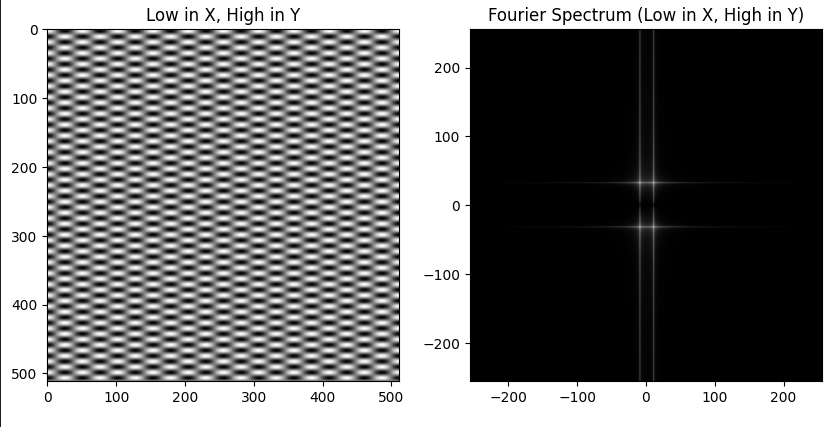
Image signal processing
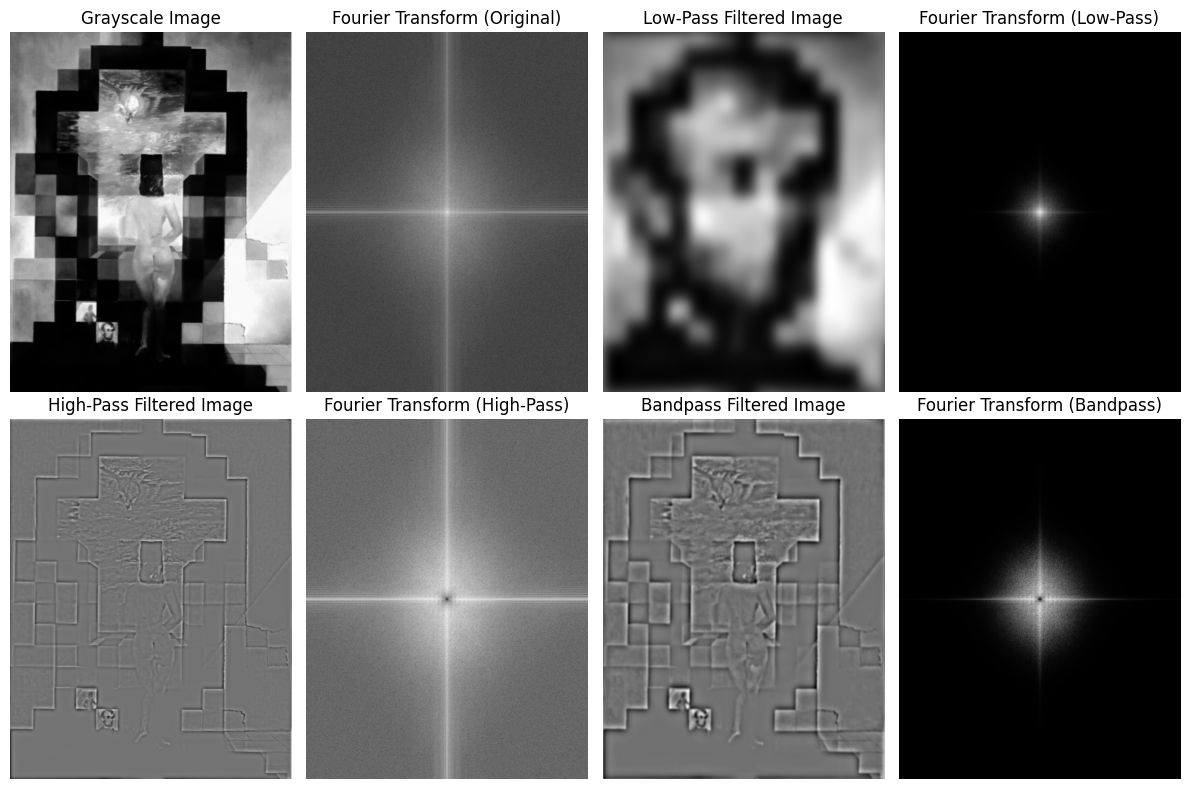 Implementation of low-pass filter, high-pass filter on the images, Phase swapping of two images
See blog-post
Implementation of low-pass filter, high-pass filter on the images, Phase swapping of two images
See blog-post
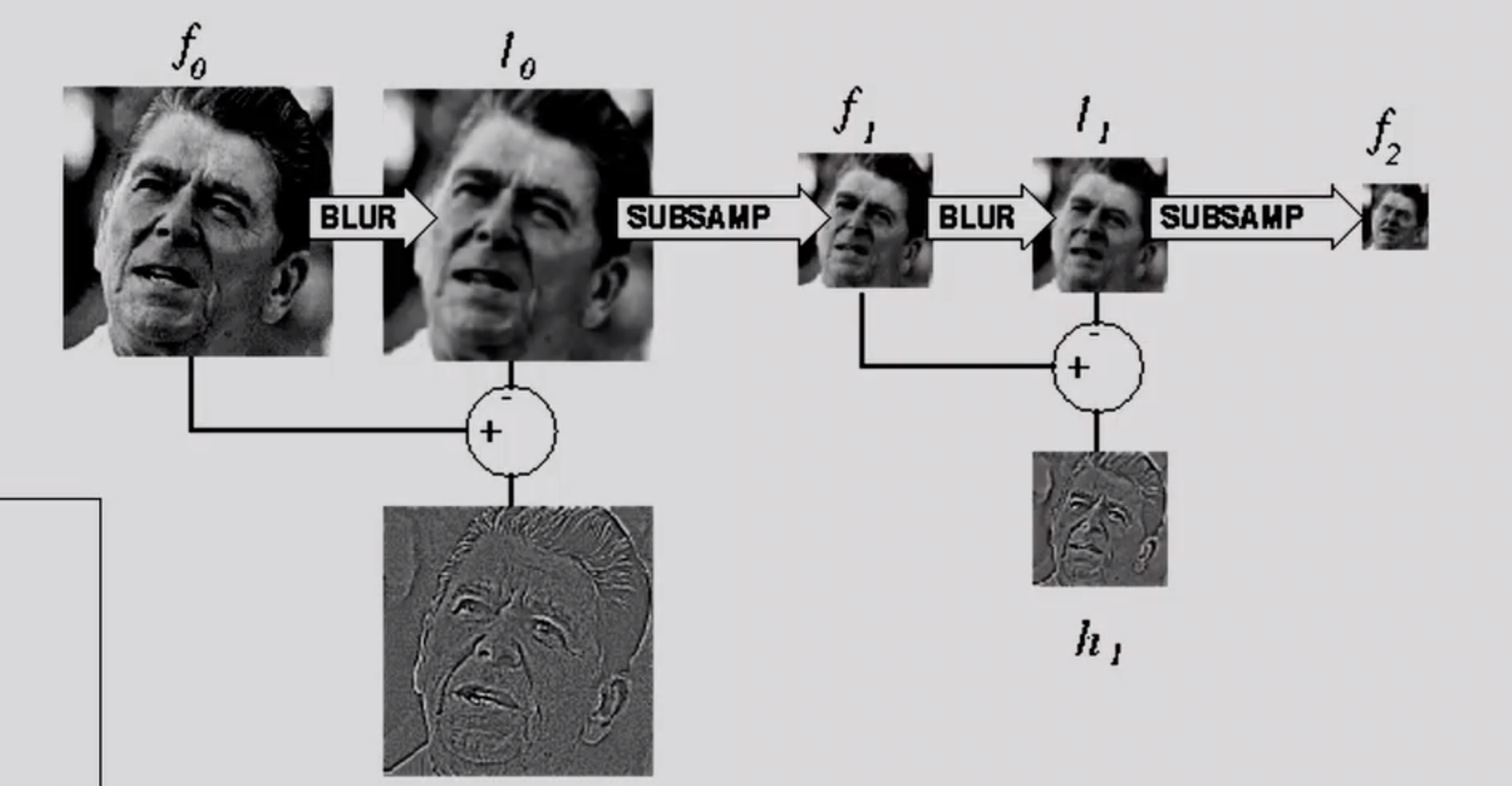
Image generation - multiresolution blending
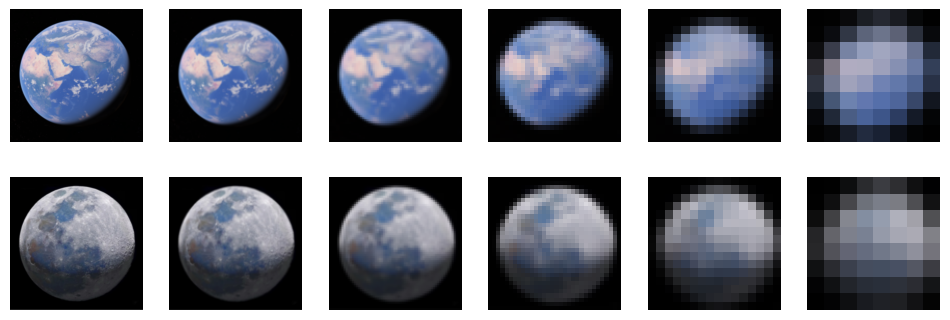
Generation of Gaussian pyramid and Laplcian pyramid as a basic encoder decoder model
Adeversarial generative networks
 Implemented a Deep Convolutional Generative Adversarial Network (DCGAN) model for image generation as described in Goodfellow’s paper, showcasing proficiency in deep learning and computer vision. (Implementation of Min-Max adversarial loss funtion)
View Code
Implemented a Deep Convolutional Generative Adversarial Network (DCGAN) model for image generation as described in Goodfellow’s paper, showcasing proficiency in deep learning and computer vision. (Implementation of Min-Max adversarial loss funtion)
View Code
LQR Controller to balance the inverted pendulmn
 Balancing an inverted pendulum by programming an LQR controller. Design of a controller by checking observabilty matrix, kalman filtering, and finally checking the controllability of the designed system.
View Code
Balancing an inverted pendulum by programming an LQR controller. Design of a controller by checking observabilty matrix, kalman filtering, and finally checking the controllability of the designed system.
View Code
Blog-posts
Image Fourier Transform
Publication
IROS 2018 https://ieeexplore.ieee.org/document/8594129 M. Harikrishnan Nair, T. Ghanshyam Singh, G. Chourasia, A. Das, A. Shrivastava and Z. S. Bhatt, “Flamen 7 DOF robotic Arm to Manipulate a Spanish Fan,” 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018, pp. 4152-4157, DOI: 10.1109/IROS.2018.8594129.
https://ieeexplore.ieee.org/abstract/document/8991313 Chourasia, Gunjan, et al. “7-dof robotic manipulator for autonomous segregation using transfer learning.” 2019 6th International Conference on Computing for Sustainable Global Development (INDIACom). IEEE, 2019.
- My Chess Opennings !!
Queen’s Gambit Knight sacrifice version
The main line of Queen’s Gambit Declined. With a beautiful knight sacrifice on move 15, checkmate was inevitable within the next four moves. I am playing white.
Sicilian Defense is the best for Black
My dark squared bishop is the MVP! The white was crushed within 20 moves. I am playing black.